Building Design Automation
Posted on
Automating and Optimizing Building Design with Deep Reinforcement Learning
Urban redevelopment requires smart, compliant, and economically viable building designs. In this project, we developed an end-to-end system that automates building design—following legal constraints and user preferences—while maximizing financial value through reinforcement learning.
Mission Statement
- Urban areas increasingly require reconstruction.
- Accurate valuation of new buildings is crucial for land investment decisions.
- If we can automatically estimate and generate optimal designs, identifying undervalued land becomes much easier and more scalable.
Problem Definition
Input Data
- Parcel polygons
- Legal boundary polygons
- Road network (as LineStrings)
-
Numerical constraints:
- Road width
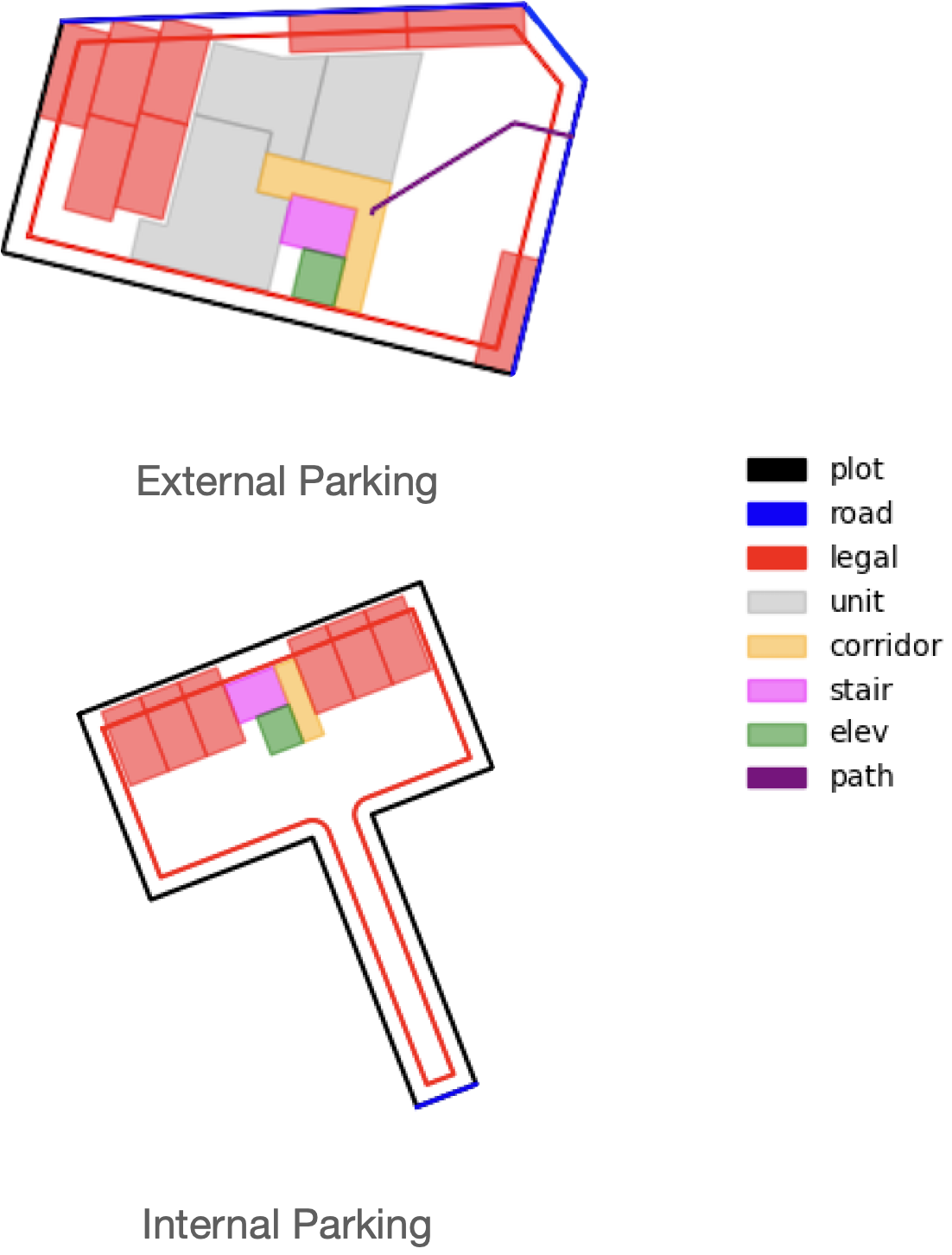
- Parking requirements (as equations)
- BCR (Building Coverage Ratio) & FAR (Floor Area Ratio)
- User preferences (e.g., unit mix, aesthetics)
Objective
Generate a building design that:
- Complies with legal codes
- Maximizes total building value (unit area × revenue per area)
- Ensures livable and practical unit design
- Is visually appealing
Problem Structure
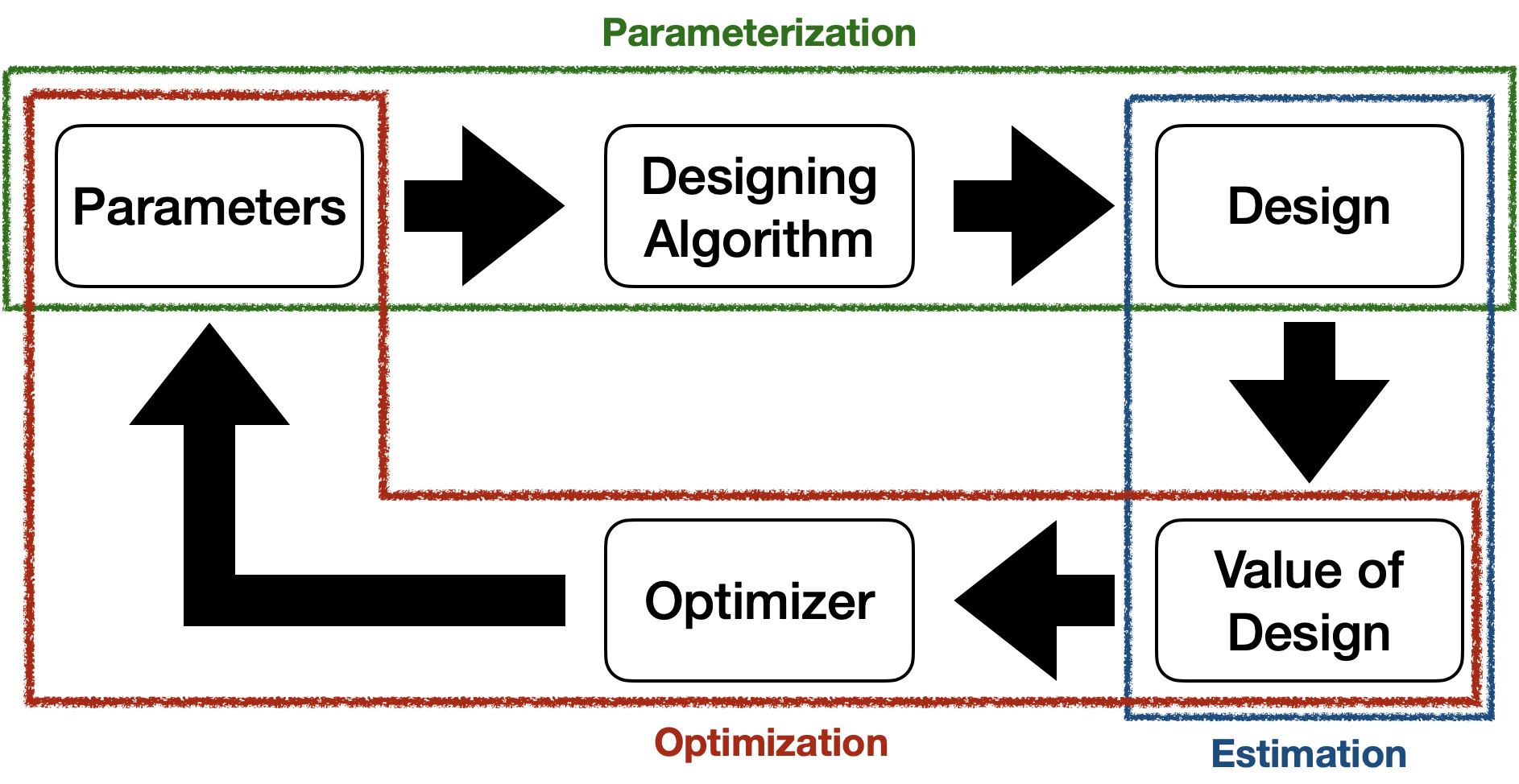
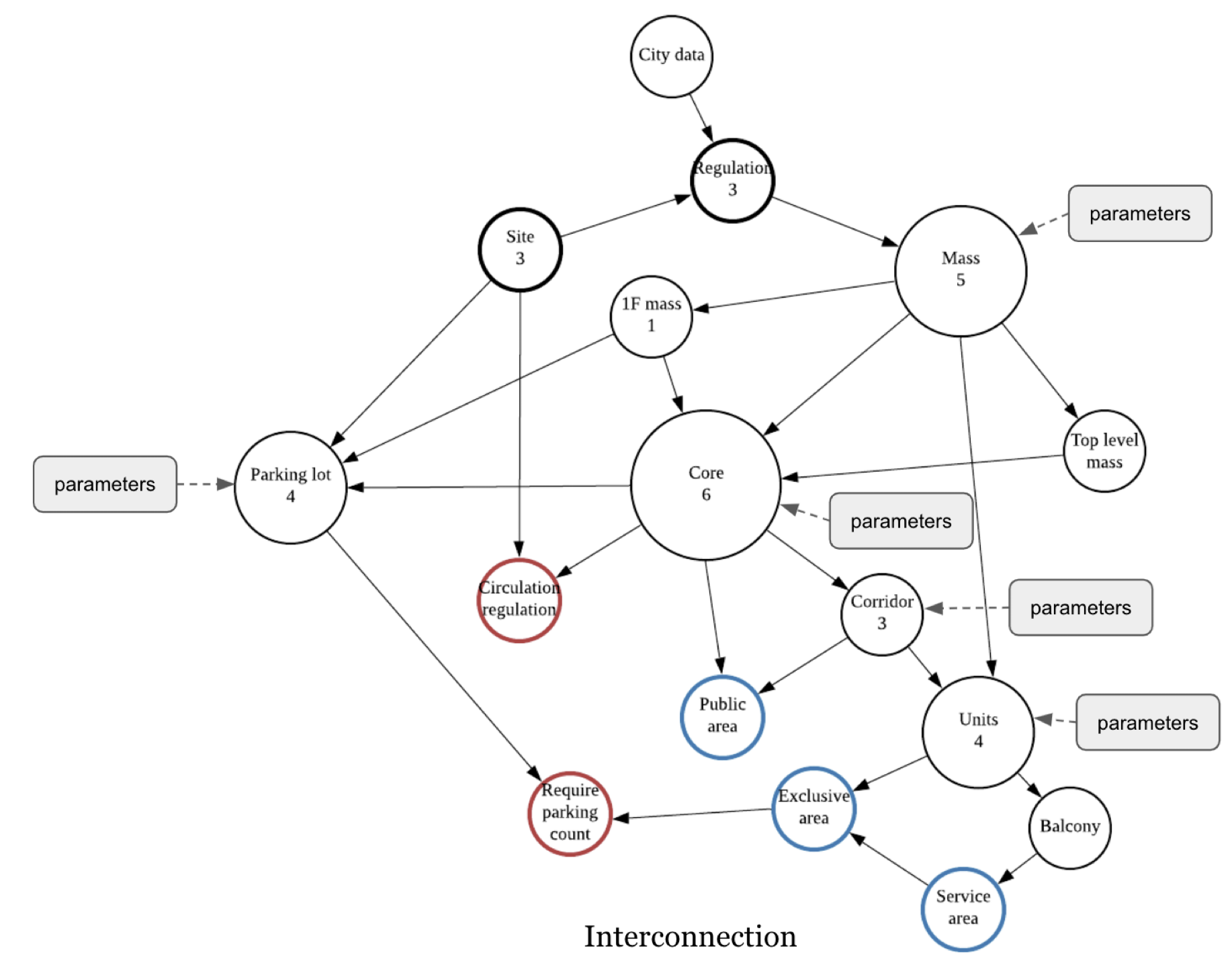
The problem is decomposed into three stages:
- Parameterization: Represent the building design as a set of adjustable parameters.
- Estimation: Evaluate the design value based on quantitative and qualitative factors.
- Optimization: Search for the best parameter set to maximize the estimated value.
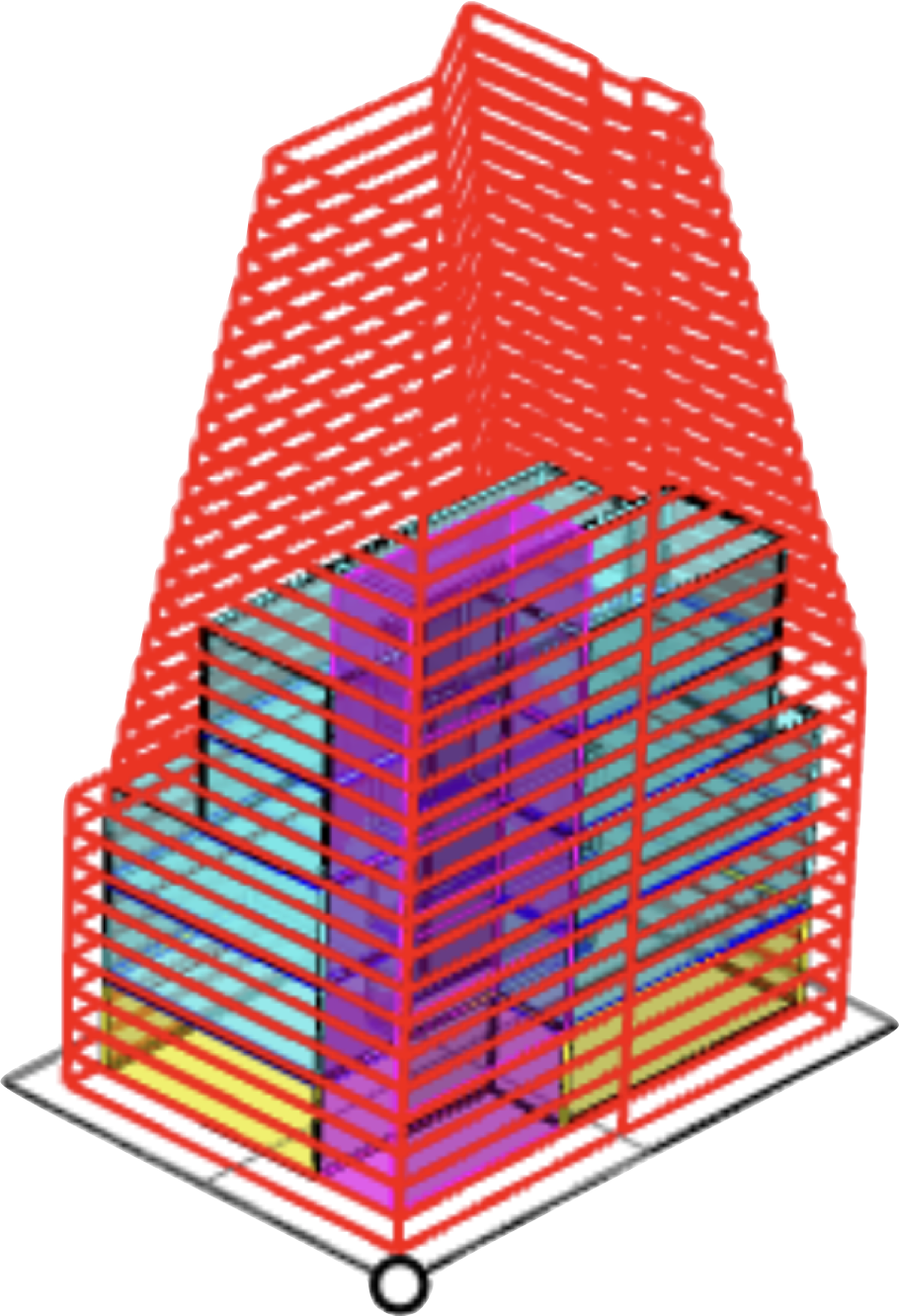
1. Parameterization
What We Did
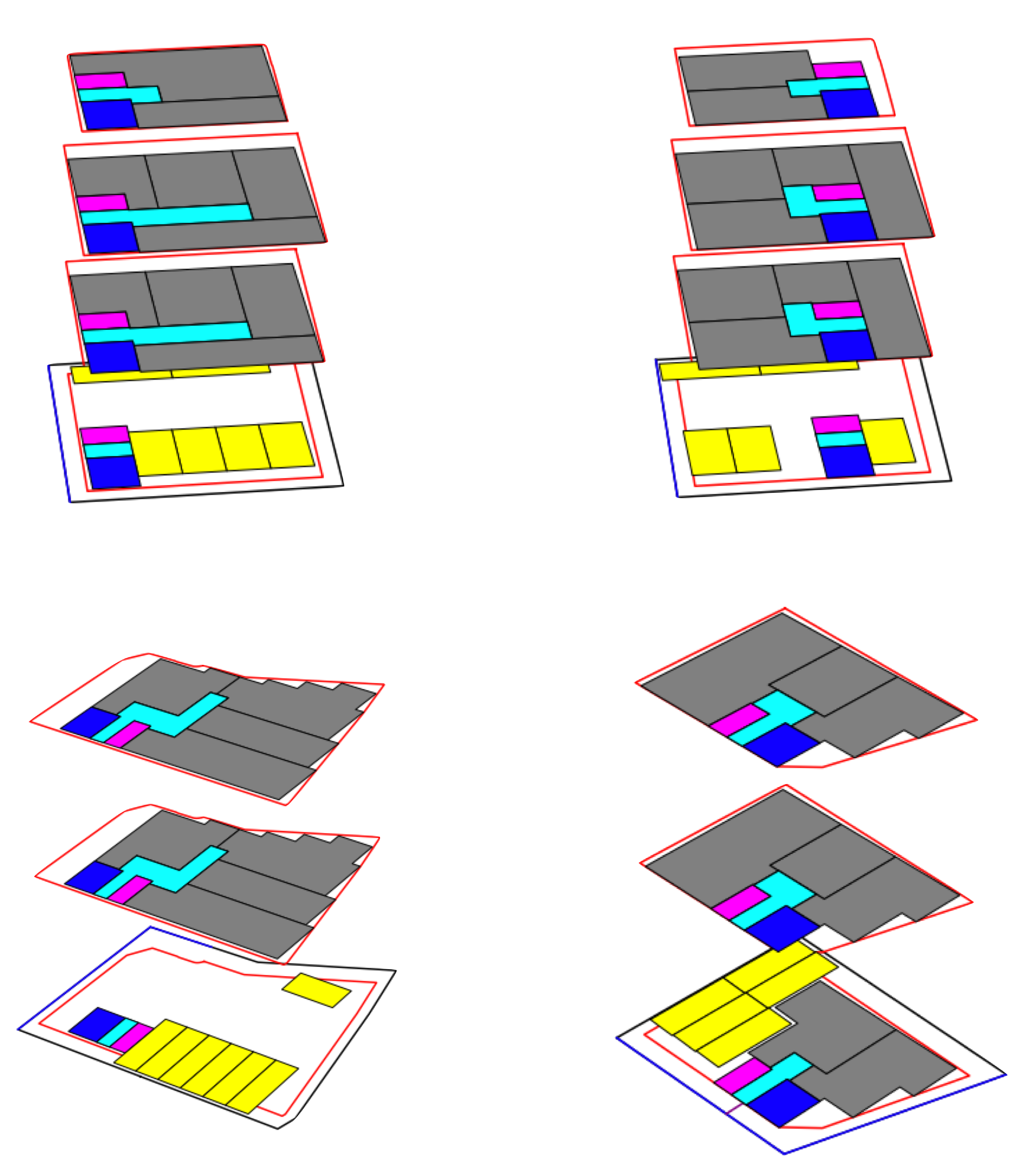
- Defined core design components: massing, core, corridor, unit, parking
-
Parameterized each component to make the design space computable
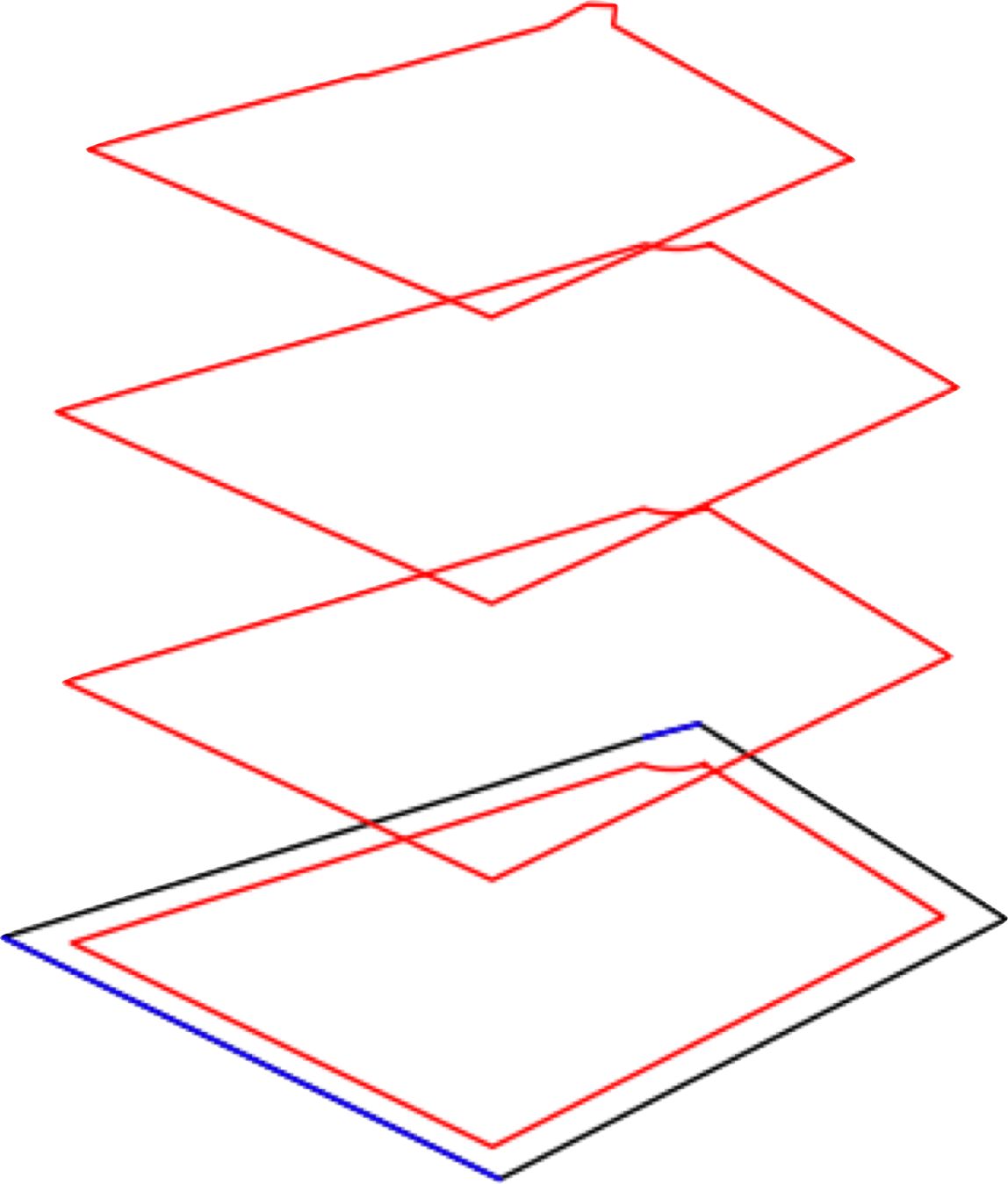
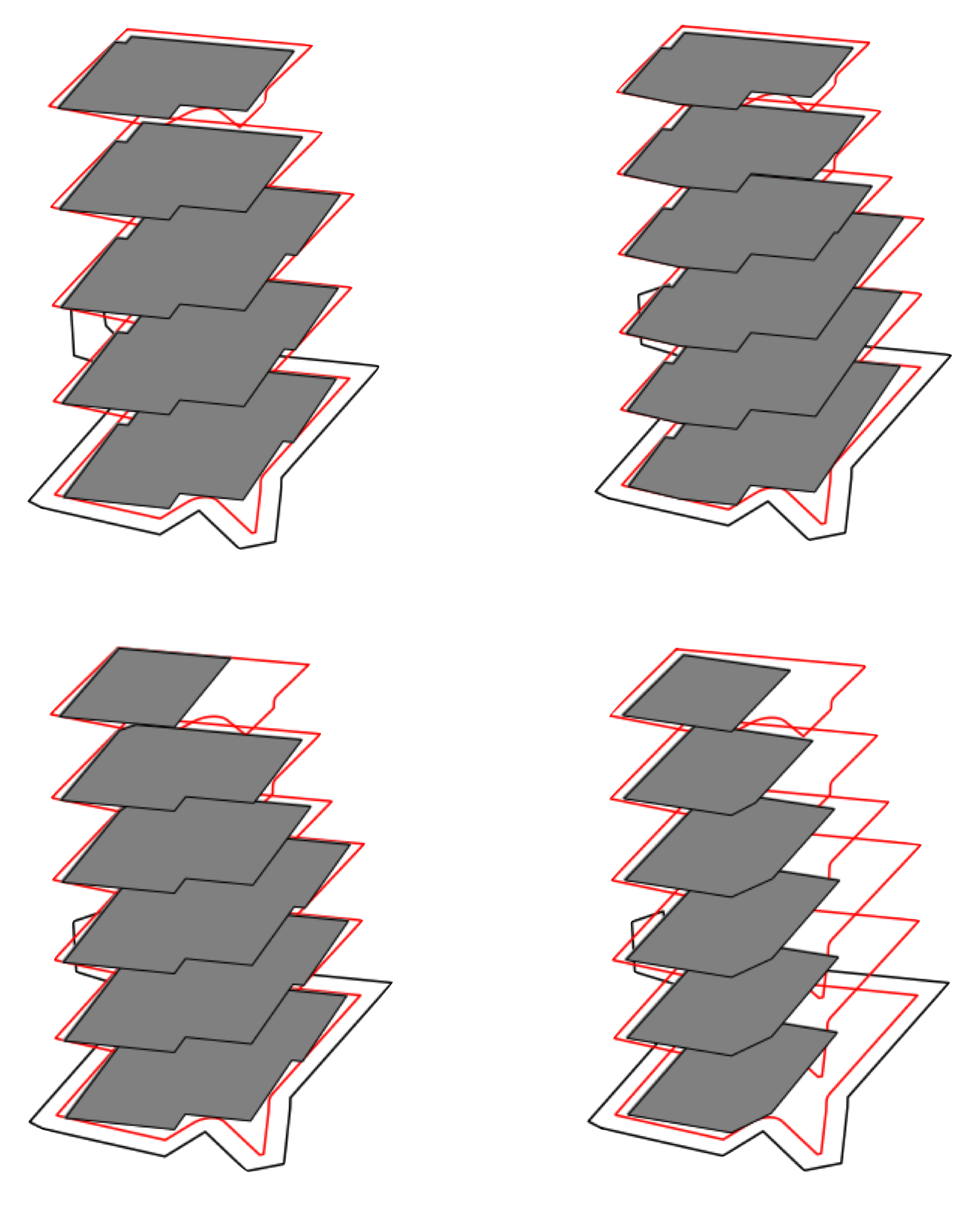
- massing
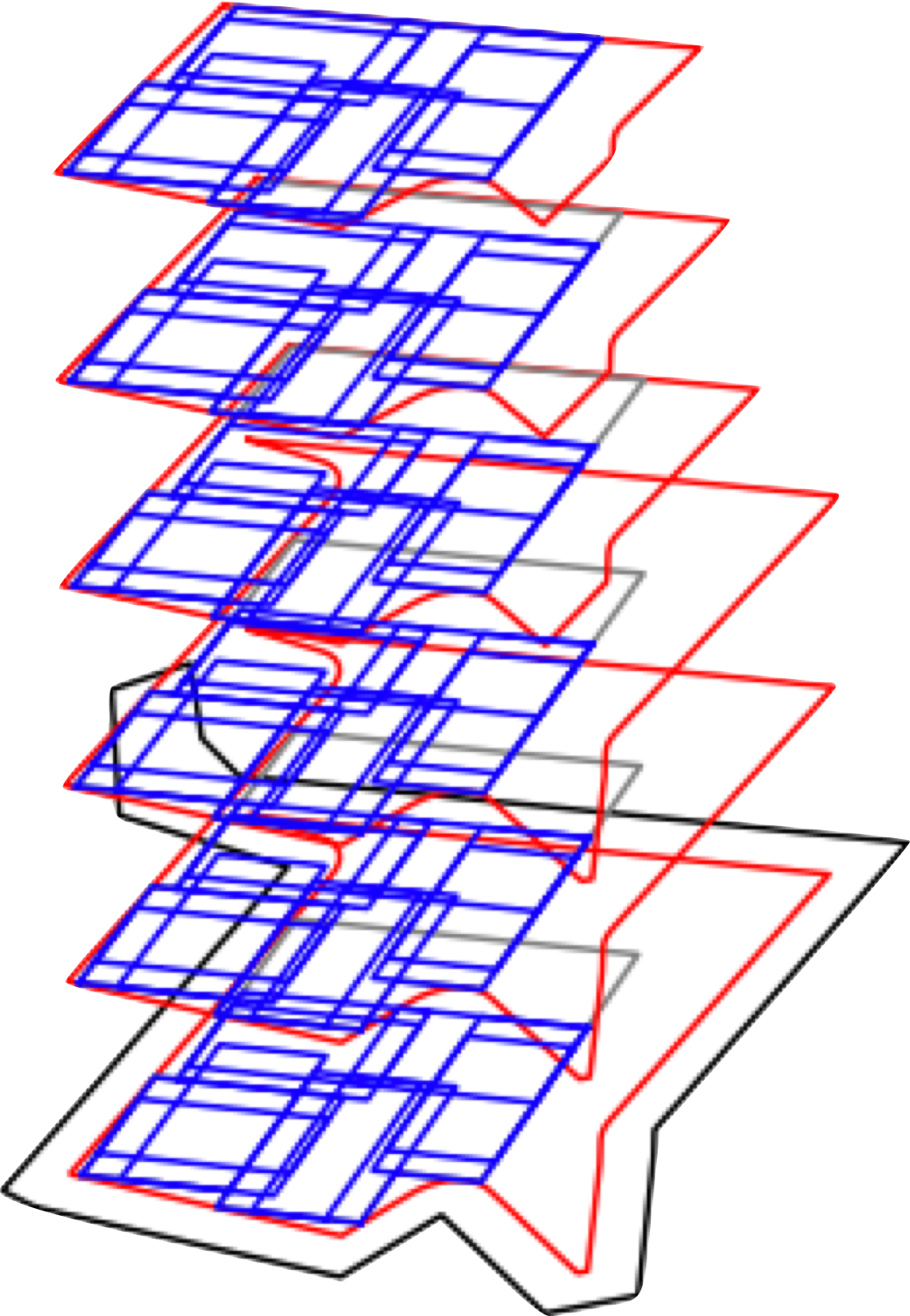
- core
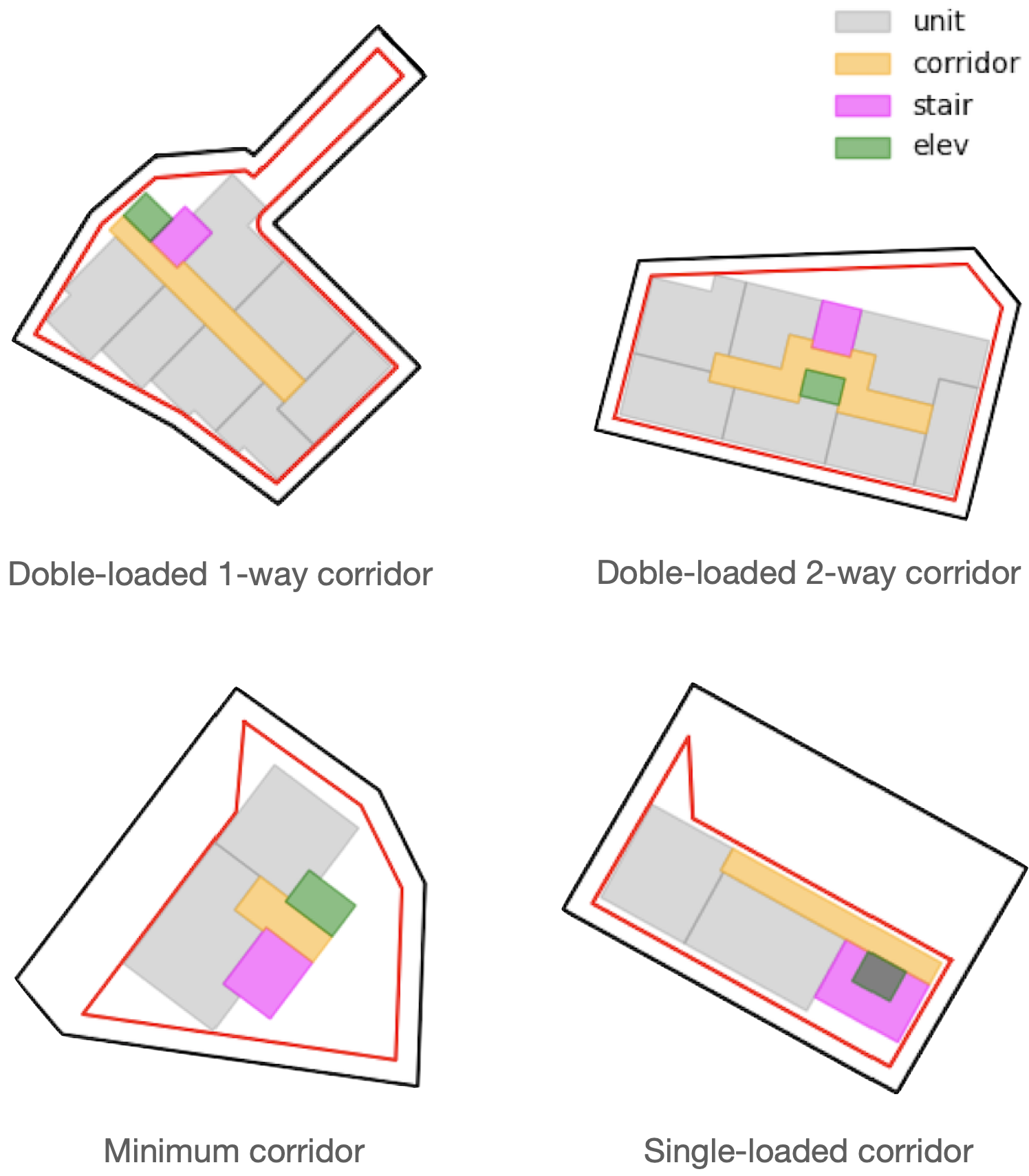
- corridor
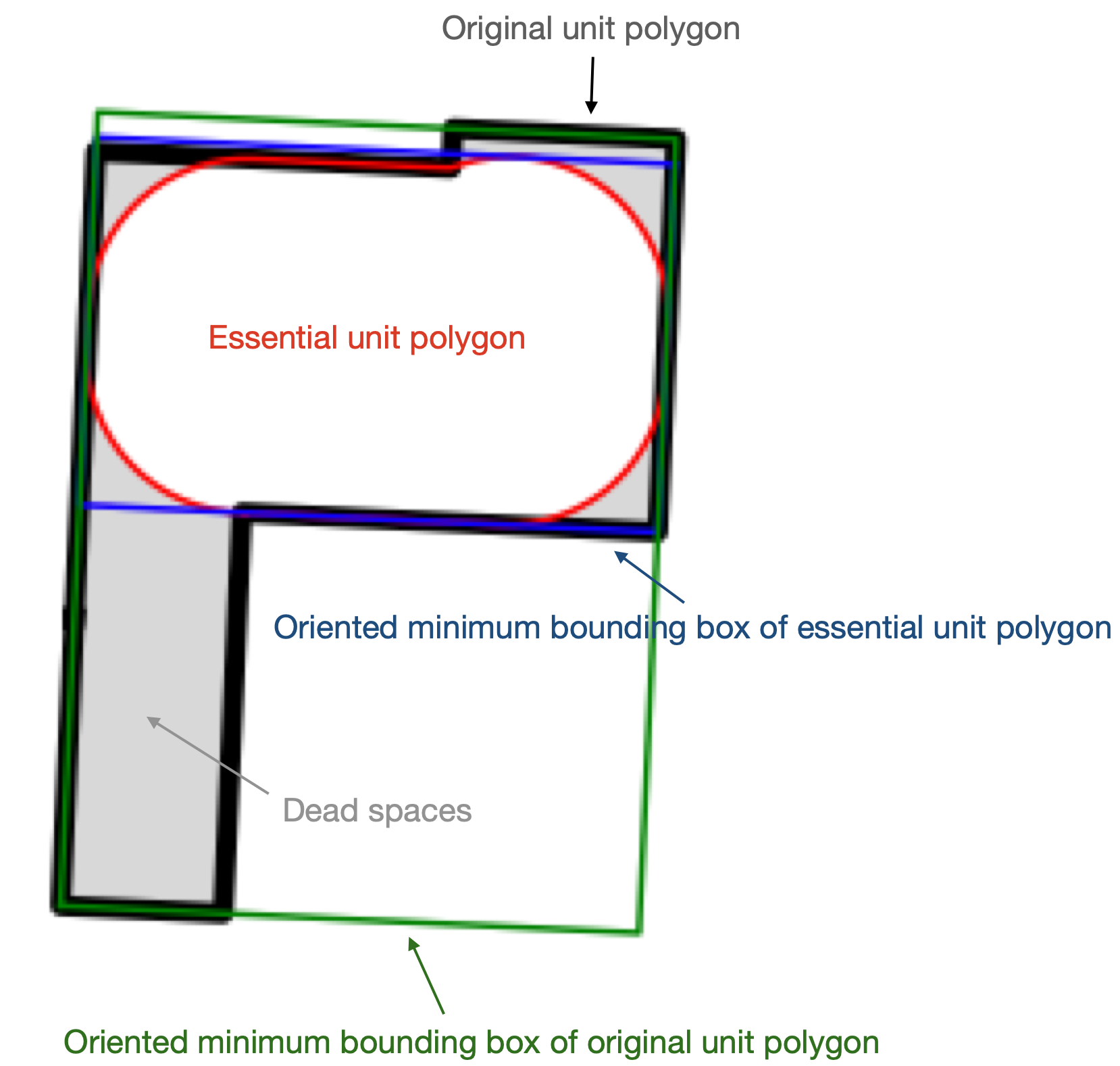
- unit
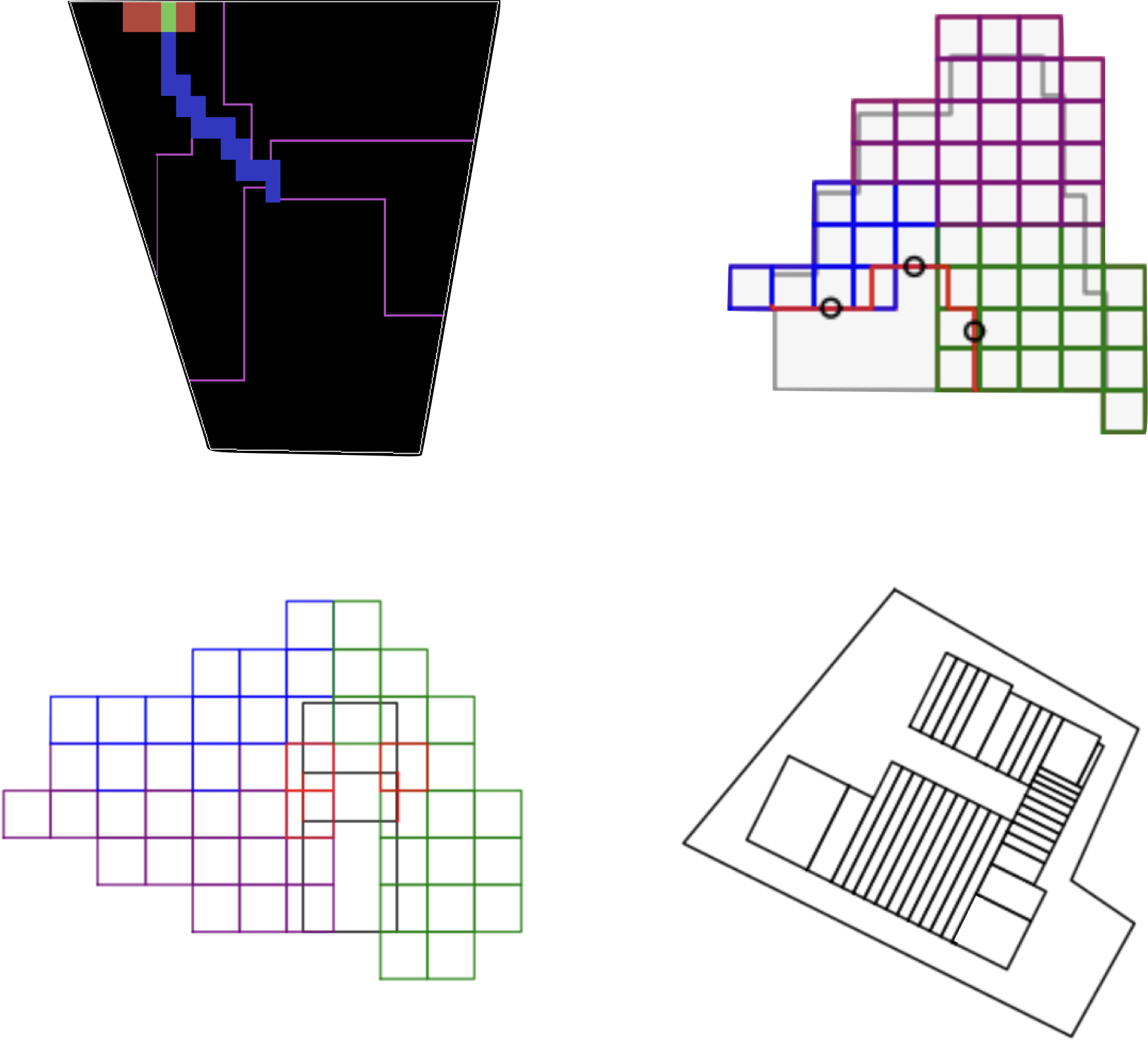
- parking
- massing
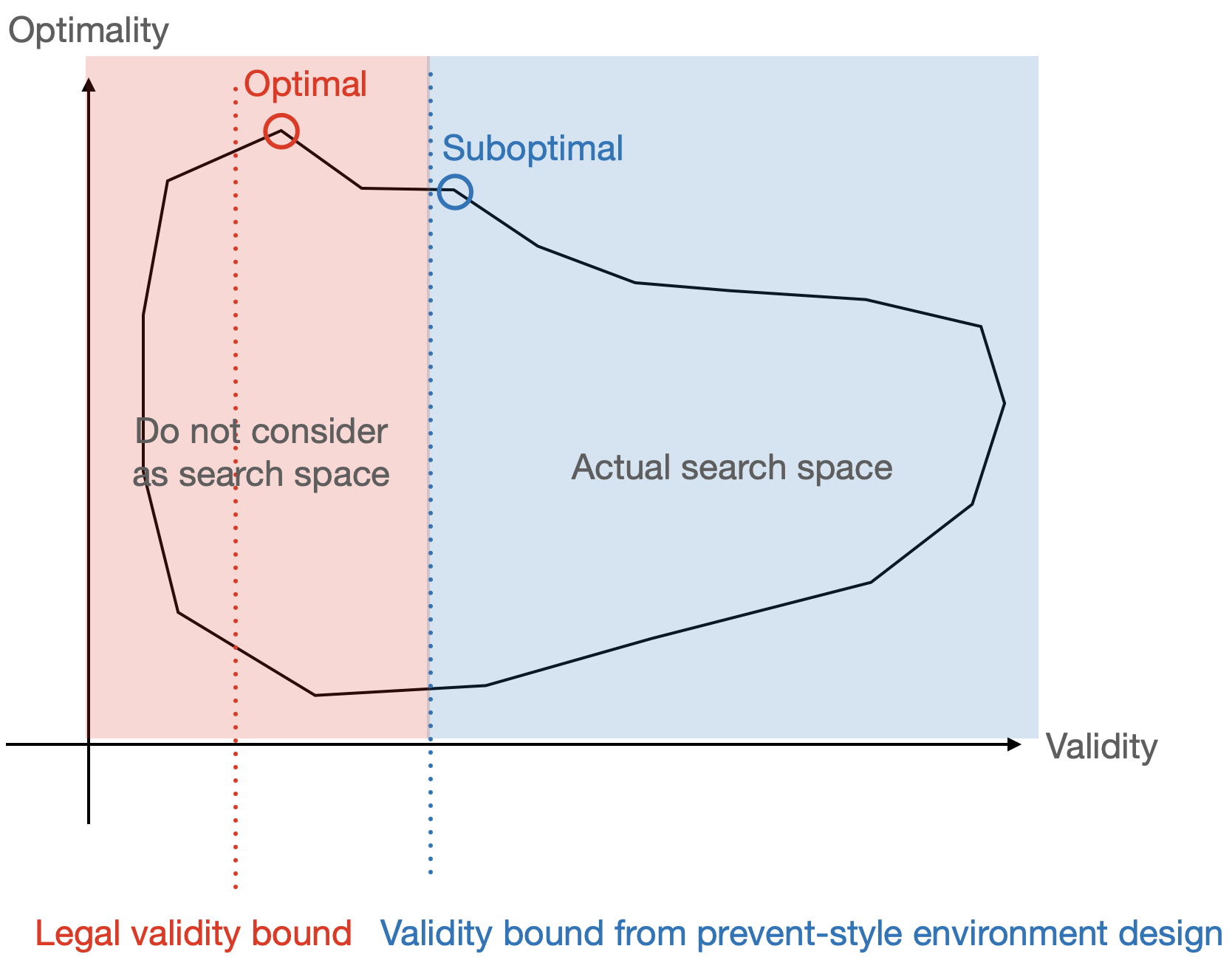
- Prevented invalid designs to reduce search space complexity
My Contribution
- While my colleague Tzung-Kuan Hsu built the initial PoC in Rhino,
I refined the logic and implemented the entire system as software.
Key Principles
- Compact parameter space: Easier to search and optimize.
- Intuitive mapping: Enables agent generalization and policy learning.
2. Estimation
What We Did
- Created metrics to evaluate both quantitative (e.g., unit area) and qualitative (e.g., livability, beauty) factors.
- Designed a weighted objective function combining multiple value dimensions.
My Contribution
- Integrated and extended the metric set.
- Developed the final scoring function used for optimization.
Key Challenges
- Conflicting goals: e.g., floor area vs. livability
- Need to quantify abstract values: beauty, openness, utility
3. Optimization
What We Did
- Framed the design process as a combinatorial optimization problem.
- Applied Deep Reinforcement Learning (DRL) to explore and generalize over large search spaces.
My Contribution
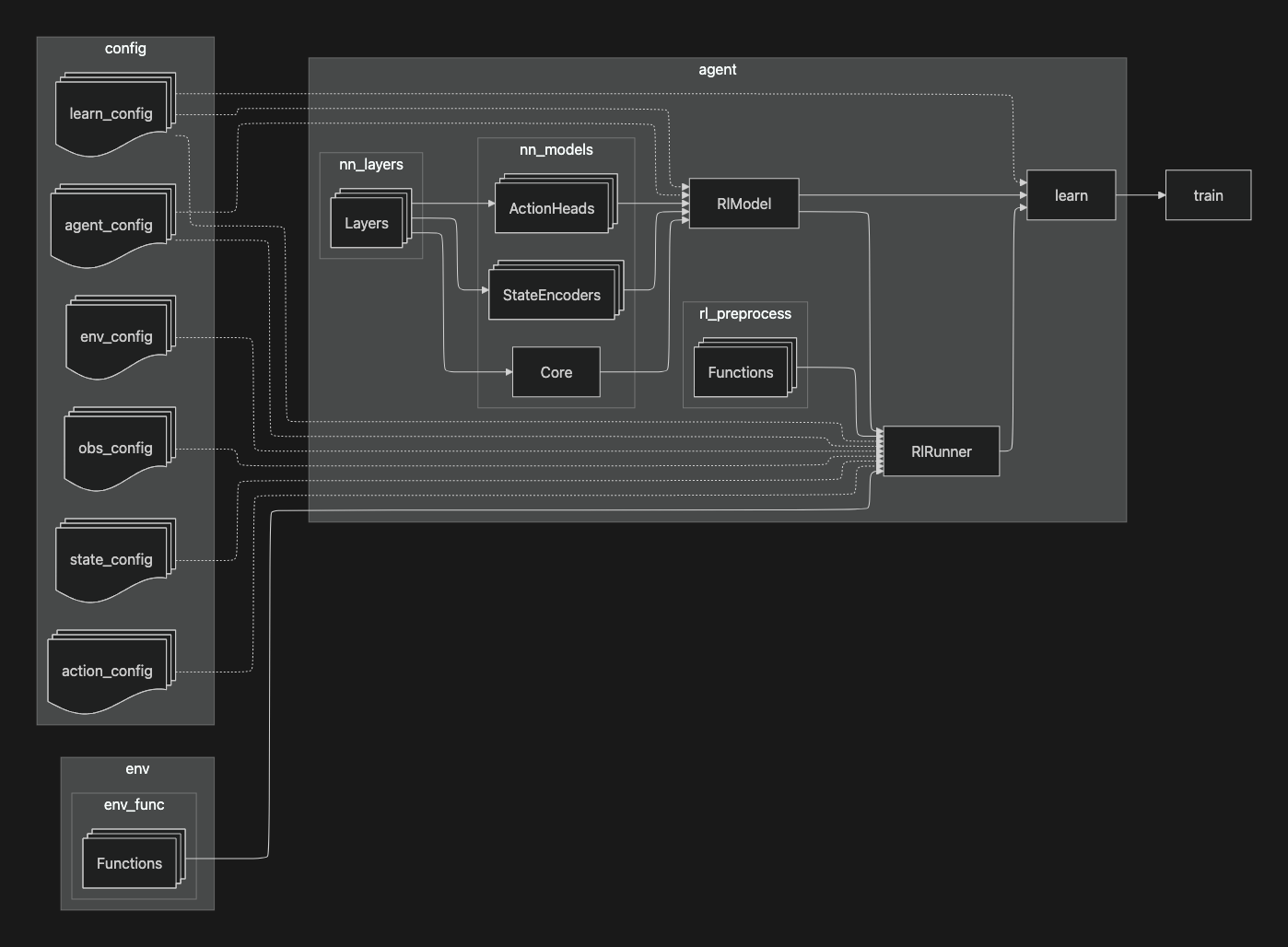
- Designed the DRL agent architecture and training pipeline.
- Selected REINFORCE as the learning algorithm for its simplicity and direct return optimization.
- Implemented masking and pointer networks to handle dynamic action/state spaces.
Why DRL?
- Traditional search methods (e.g., greedy, exhaustive) fail due to high interdependencies.
- DRL allows feature-based decision making, enabling generalization across parcels.
Technical Insights
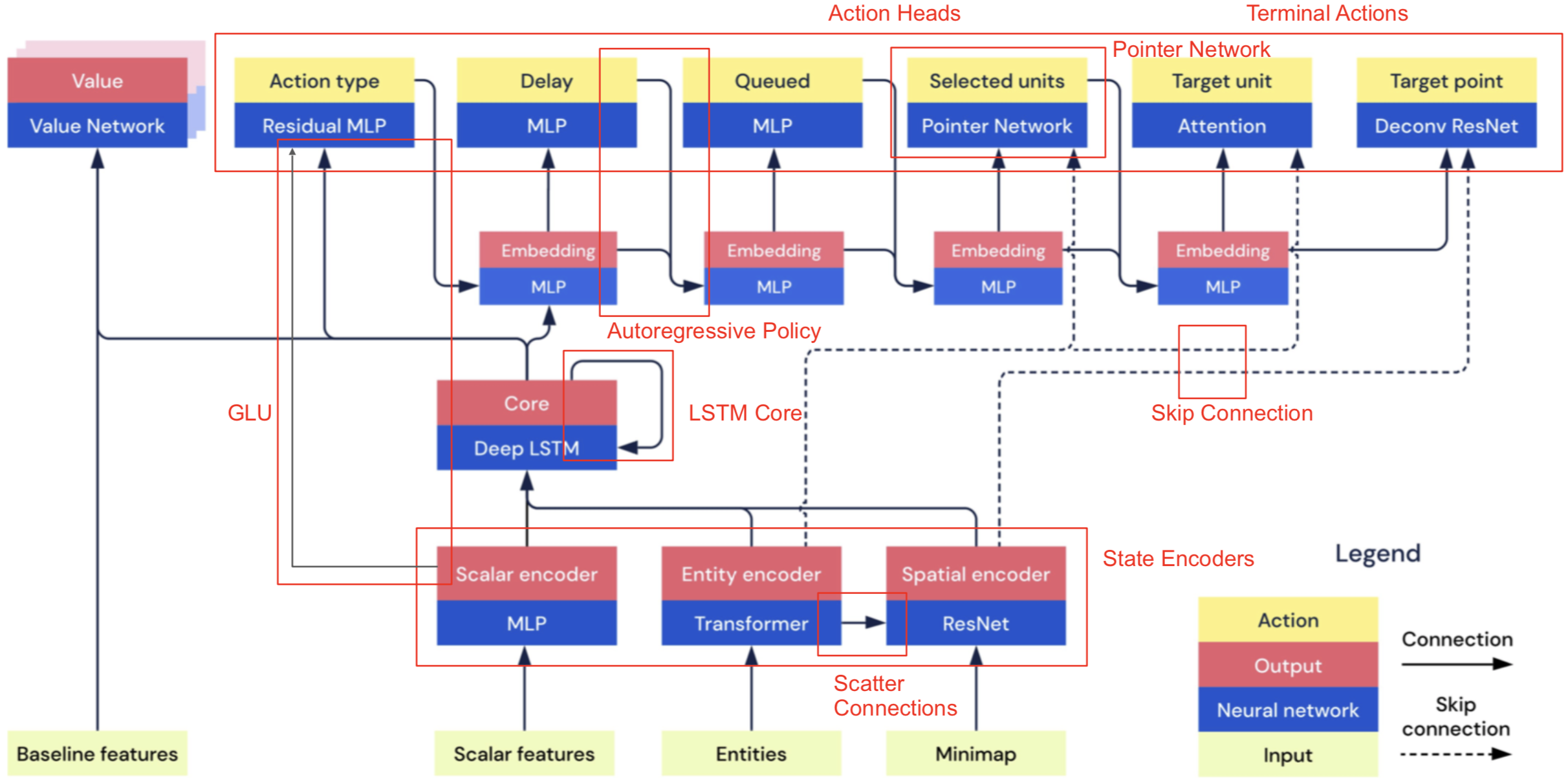
- Used autoregressive policies to model joint action distributions.
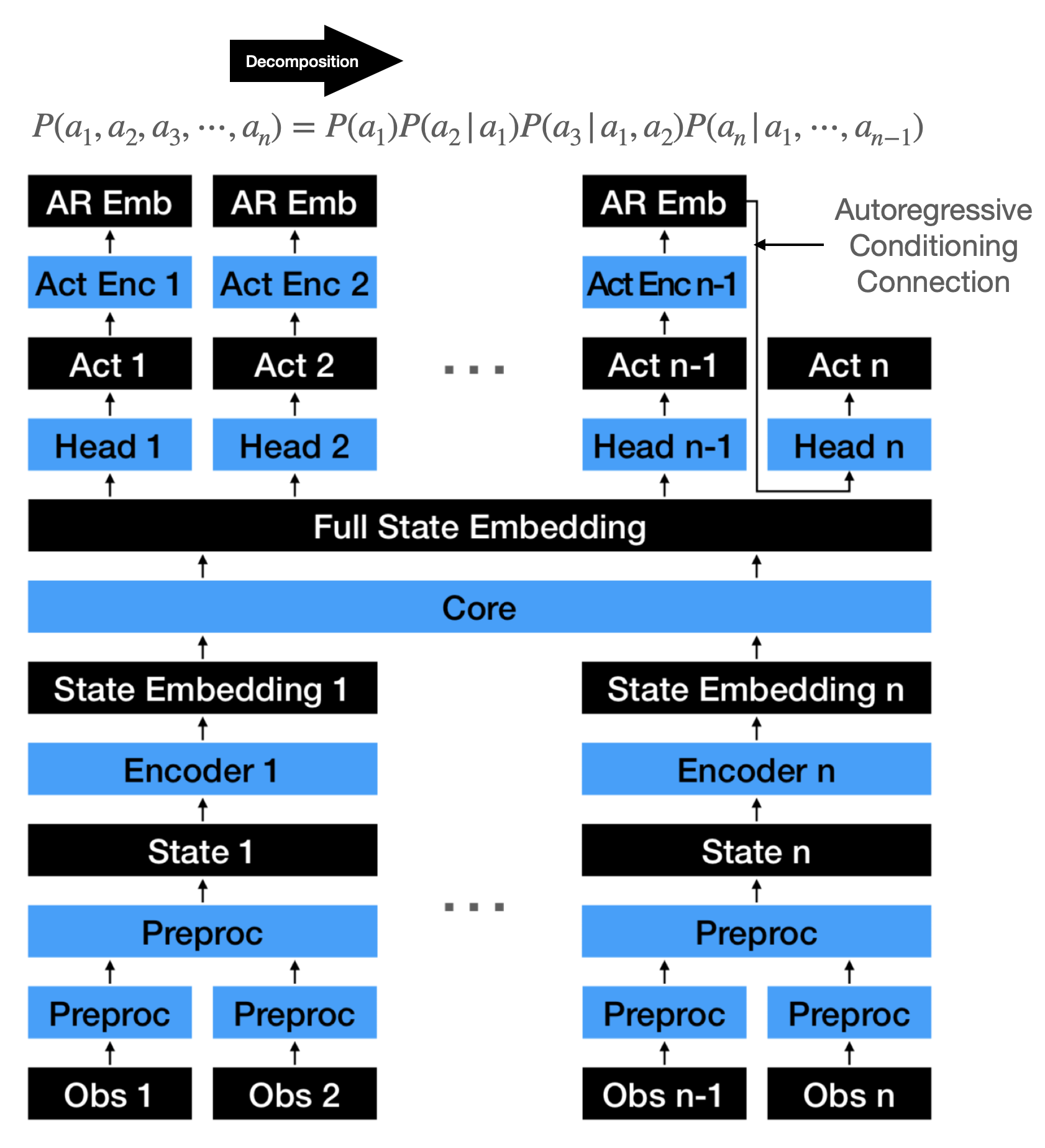
- Incorporated pointer networks to remove index binding from action spaces.
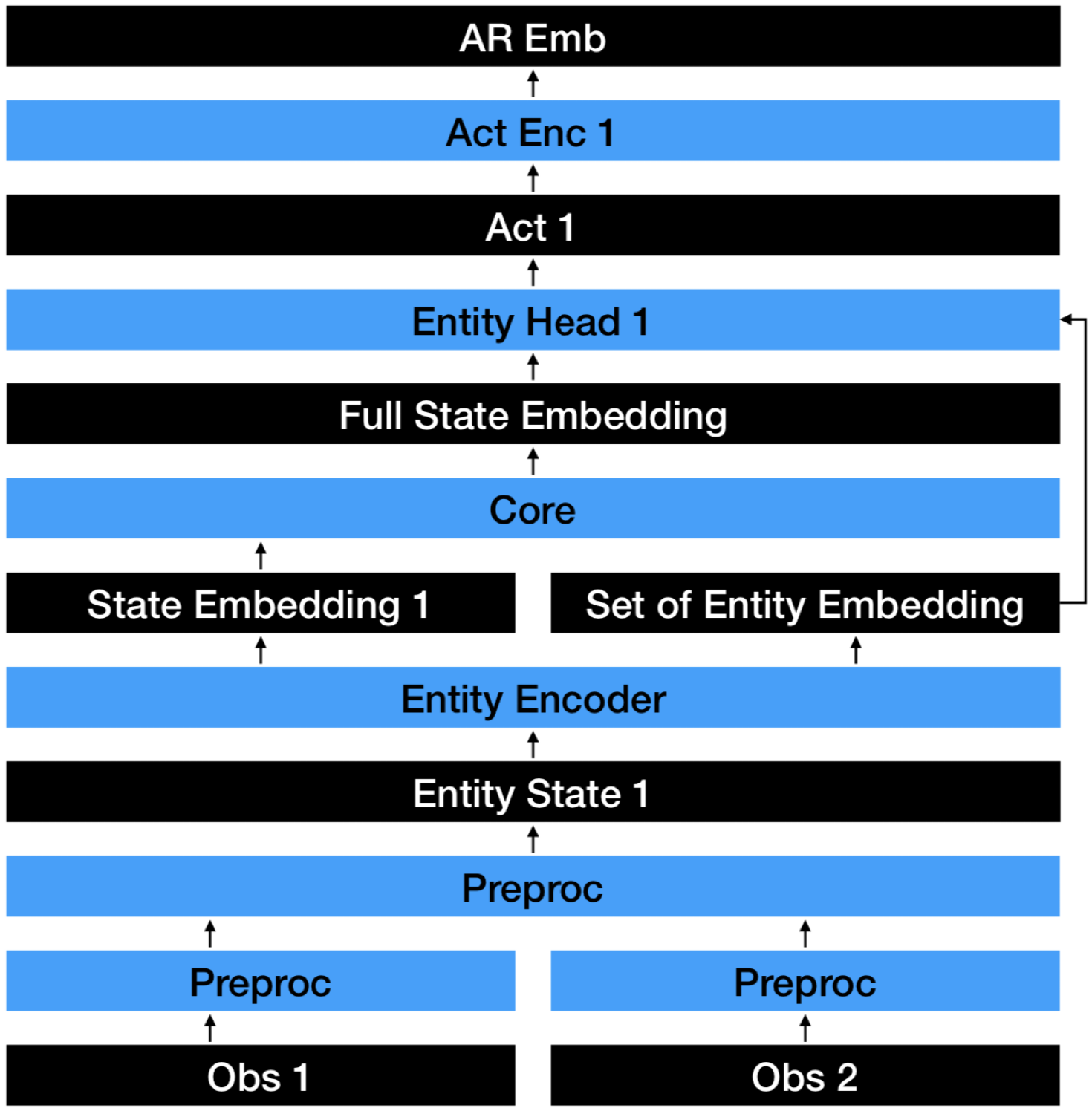
- Inspired by AlphaStar’s architecture for structured state/action encoding.
- Designed Modular RL Agent Architecture for Adaptive Environments.
Real-World Deployment
- Launched as a mobile app service: Landbook Premium (Sep 2021)
- Generates viable building designs within 3 minutes
Retrospective
Strengths
- Successfully automated a multi-step architectural design process
- Achieved generalization and rapid generation over various parcels
Limitations
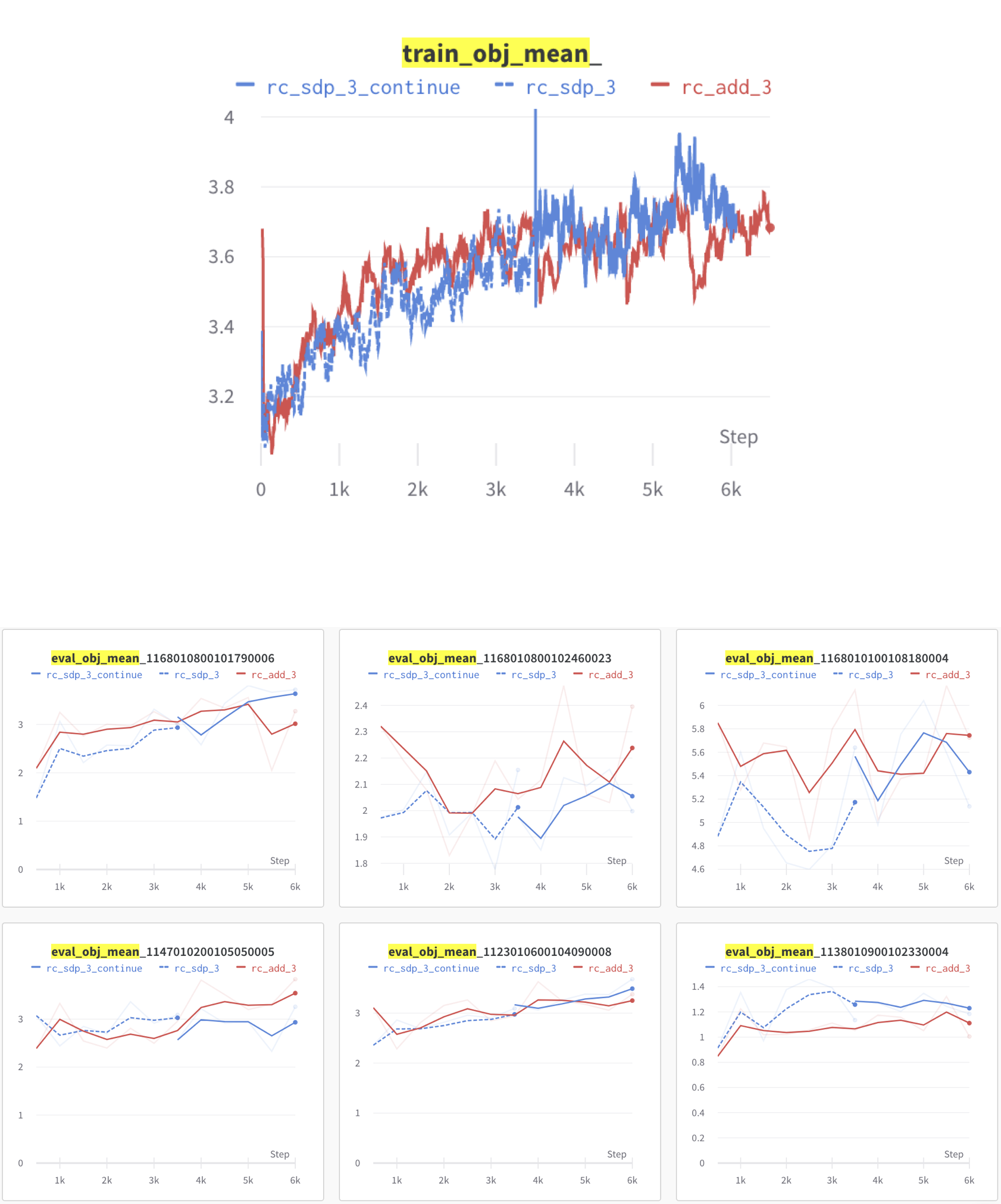
- Some action heads showed low entropy and weak training signals
- Requires further tuning and experimentation for better convergence
Building Design AutomationProblem SolvingCombinatorial OptimizationReinforcement LearningGenetic AlgorithmEvolutionary StrategyParameterizationOptimizationSpacewalk